We know that the seas and oceans cover more than 70% of the earth's surface, and such a vast extension has been very little explored, and studies of these bodies of water are urgent for environmental protection plans, on the other hand, a high percentage of the garbage that reaches the oceans sinks to the seabed, making it very difficult to recover, and most of this garbage is plastic waste, which takes hundreds of years to degrade, causing serious environmental and health problems. Therefore there is a need to develop a technology capable of performing large-scale underwater manipulation tasks, able to take samples of organisms or garbage and transport them to the surface, which is why scientists at the Max Planck Institute have developed an underwater robot capable of moving and manipulating objects such as jellyfish with which they hope to collect samples or garbage from the ocean floor.
Scientists develop jellyfish-inspired robot. Source: pixabay.com.

The idea of using robots to retrieve objects from the seabed is not new, but current underwater robots are bulky, rigid-bodied vehicles, propelled by electric motors or hydraulic pumps that produce noise and vibrations, so their activity has an impact on the seabed and the species that live there, This is why it is necessary to develop robots that can operate smoothly and without noise in order to interact with marine species without affecting their ecosystem. The results of their design were recently published in the journal Science Advances.
The robots used for the recovery of objects in the ocean are rigid and generate noise and vibrations.Source: pixabay.com.
The robot was designed with a diameter of 160 mm to be comparable in size to an adult Aurelia aurita (a common jellyfish), and has six lappets, each of which can be individually controlled for various functions. Each lappet has flexible rotational joints driven by artificial electrohydraulic actuators that propel the robot, these actuators function as the robot's muscles, and a power source periodically supplies electricity through thin wires, causing the muscles to contract and expand, which makes the robot swim like a jellyfish, allowing it to create whirlpools under its body.
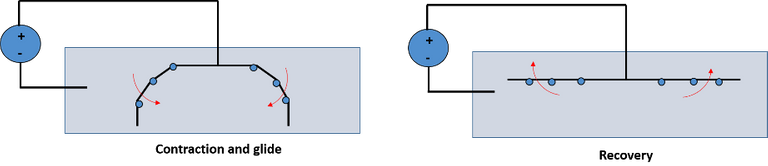
The generation of locomotion is similar to that of jellyfish. The charging period of a resistor corresponds to the contraction and glide phase, and the discharging period corresponds to the recovery phase. Source: Image elaborated in Powerpoint.
In this sense, the scientists sought to imitate the swimming of the jellyfish, since when it swims upwards it creates currents that allow it to collect nutrients, but this also allows it to trap objects around its body. The jellyfish robot also creates currents that circulate the water around it, this function allows it to collect objects, such as plastic particles or samples of organisms, such as fish eggs, which can then be transported to the surface. And furthermore, they can work alone or in combination, the researchers demonstrated that two or three robots can cooperate to lift larger loads.
In other words, the jellyfish robots are capable of catching objects in the water practically without having to touch them, which is very important for not altering the ecosystems where they are used, in addition to moving very quickly and stealthily, compared to other current designs of underwater robots inspired by other natural morphologies. On the other hand, the researchers also assure that they are safe for people and fish, in case the insulating layer that covers the robot breaks.
At this point in the research, the jellyfish robots still need a wired connection, so the next step is to make wireless robots. However, the study presents an interesting robot in the form of a jellyfish, which could be used to clean the oceans or collect samples from the seabed with minimal impact on the ecosystem.
Thanks for coming by to read friends, I hope you liked the information. See you next time.
References
Tianlu Wang, Hyeong-Joon Joo, Shanyuan Song, Wenqi Hu, Christoph Keplinger, and Metin Sitti. A versatile jellyfish-like robotic platform for effective underwater propulsion and manipulation. Science Advances Vol. 9, No. 15