Besides my InMoov robot project, I sometimes get also hooked on other robotic projects. One of those was the Hexapod by Vorpal. In this post, I want to write about my building experience and give some hints how you could avoid issues.
As a 3d printing geek, I supported the Kickstarter campaign with a Maker Kit. Sourcing all electronic parts and printing the plastic stuff yourself is a very convenient way. Sometimes finding shops for the different parts can be tricky. Once I received my kit a few months after the successful campaign, I already had all the STL files printed.
The Printing
The printing process was straightforward. You can download the STL files from Thingiverse . Except for the cap, all parts were printed smoothly with the first try.
For the cap, there are two variations. The default cap is just a skeleton type object and an the other is entirely surround cap. The skeloton cap didn't print very well as I had a layer shift due to failures with the overhanging areas.

I decided to try the full cap and print this with support. It uses a lot more filament but did work very well.
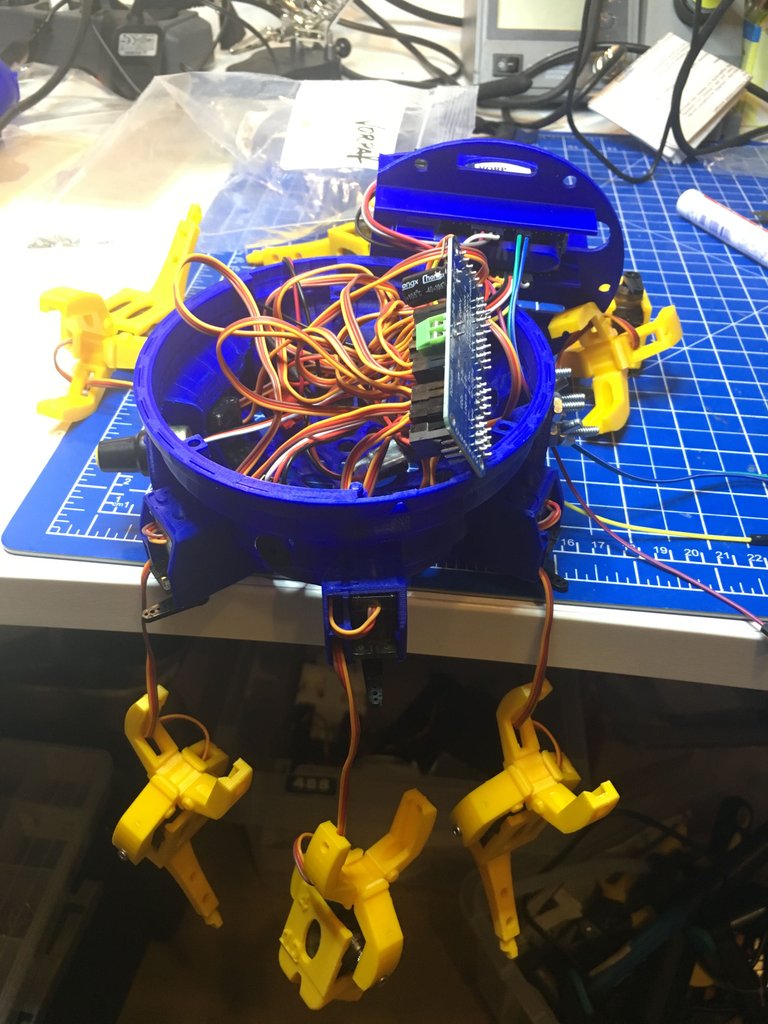
The Assembly
The assembly, unfortunately, wasn't that smooth. I followed the guide that is provided on the web page, and when turning the servo motors the first time on, one of them was already jittering entirely out of control. After replacing this one with the spare servo that is included in the kit, I could at least get the robot moving a little bit. But after 30 seconds, multiple servos seemed to get too hot and jittered. They lost their calibrated positions and also didn’t develop their full strength. The hexapod barely moves up from the bottom after 30 seconds.
After contacting the Vorpal support, they told me that there are some quality issues with the servo manufacturer. I got promised a replacement for all the broken servos. And they delivered within 1-2 weeks. Very fast compared with the first package that took already 6 weeks alone with the parcel service from the USA to Europe. As I didn't expect them to deliver it so fast, I ordered some original Tower Pro MG90S from a european location. The Chinese clones from Vorpal and my original servos arrived at the same time. I decided to keep 6 of the TowerPro clones in the hips and put the original ones in the knees. The knees are exposed to a lot more force, and therefore more quality is probably not hurting here. When you use the original TowerPro Servos, you need to be aware that the Servo Horns don't fit. Luckily, I could replace them with the servo horns from the broken ones.
Exchanging and replacing the Servos after fully assembling the robot was a pity. To avoid this, you should connect all servos to the Arduino and the servo shield first, and then do some stress tests with them. If you notice jittering or other problems you can replace this one right away.
After all, the assembly was fun and definitely more straightforward than for other projects. The documentation is helpful and got even better in the meanwhile. Also, the support by Steve Pendergrast was excellent!
Playing with the Robot
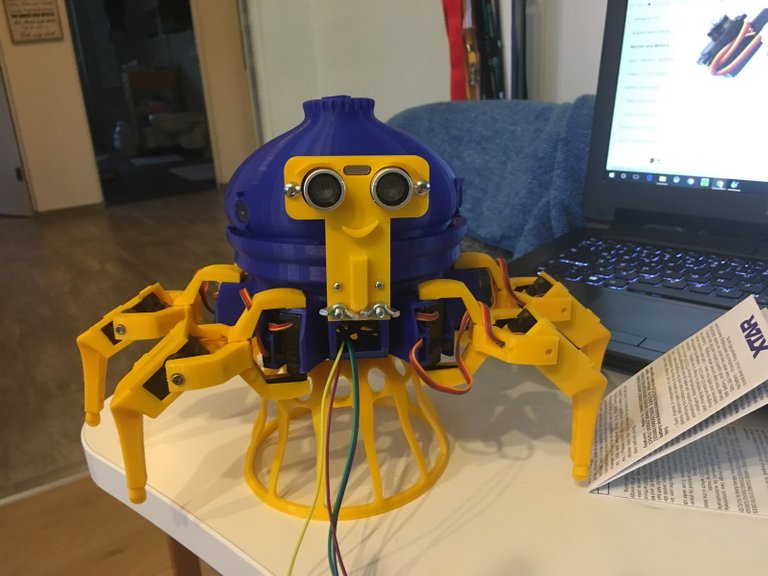
For some projects, "the route is the goal." What you are learning while building robots sometimes doesn't hold up when you are using the new toy. For the hexapod, this is not the case. He has already so many moves and features that it is a great platform. As you can see in my video and the others that I linked.
My Hexapod Video
Here‘s the official Video
As the complete robot is open source, there are also many add-ons already available. The hexapod is an excellent platform for robotics intermediaries to learn advanced concepts about sensors and programming but also easy to enhance with customer modifications and testing and playing with different enhancements.
Look further for my next posts. I already have one mod almost finished and a long list of ideas.
Doesn't this robot need some Voice commands ?
Happy printing !
Dr. Make
Being A SteemStem Member
amazing project
Congratulations! This post has been upvoted by SteemMakers. We are a community based project that aims to support makers and DIYers on the blockchain in every way possible. Find out more about us on our website: www.steemmakers.com.
If you like our work, please consider upvoting this comment to support the growth of our community. Thank you.
That is an excellent hexapod !
It seems to mainly enjoy dancing, any plans for more utilitarian functions (like getting the newspaper in the morning ;) ) in the future ? :)
yea when he starts dancing this realy is so funny :)
I never knew there are such open-source robot projects. So @drmake you filled that gap with this post. Hexapod looks and behaves just great. We watched your video with my son and he was asking to replay it again and again. So we watched it probably about 10 times!)) Robot dances really cool. Does it have some remote controller or he behaves only by his own?
There is a remote controller that can be used to control him and you can also program your own moves and uses sensors to let him navigate on his own.
Wow, very cool, i need to show this to my brother.
Wow! Inspiring
You got a 15.38% upvote from @bearwards courtesy of @drmake!
You got a 7.87% upvote from @upmewhale courtesy of @drmake!
click here.Congratulations @drmake, this post is the tenth most rewarded post (based on pending payouts) in the last 12 hours written by a Superuser account holder (accounts that hold between 1 and 10 Mega Vests). The total number of posts by Superuser account holders during this period was 1520 and the total pending payments to posts in this category was $13930.75. To see the full list of highest paid posts across all accounts categories,
If you do not wish to receive these messages in future, please reply stop to this comment.