Buenas Tardes Steemians, es un placer saludarlos nuevamente. En este Post les mostrare una mejora muy significativa en que participe en la planta donde trabajo.
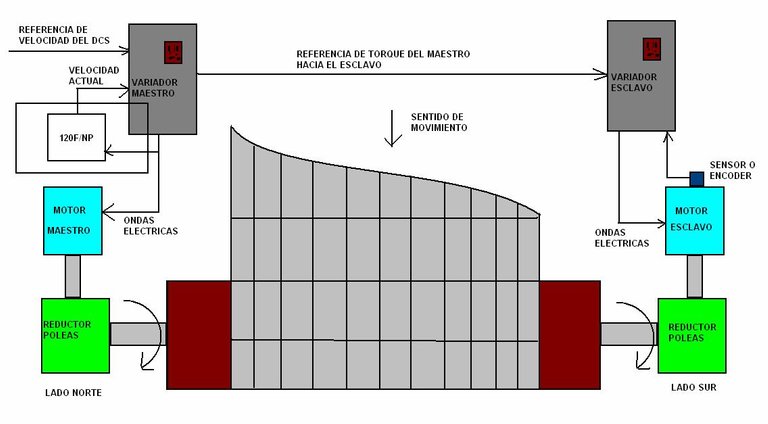
La parrilla móvil es uno de los equipos principales para la producción de la planta, en donde se realiza una cocción a diferente temperatura al producto, la misma posee un sistema de control de velocidad que esta conformado por dos motores acoplados mecánicamente a un mismo eje, por lo cual requieren de una aplicación especial de control conocida como maestro/esclavo en modo velocidad/torque. De tal manera que el esclavo sigue al maestro.
El motor esclavo tiene un sensor de velocidad, que al fallar este o el cable, el motor maestro se tranca, disparando el drive con un comportamiento idéntico a una falla por traba mecánica. Esta situación crea altos tiempos de parada y dificulta el diagnostico diferencial entre mecánico y eléctrico además el alto consumo de sensores y tiempo de paradas.
El trabajo se dividió de la siguiente manera:
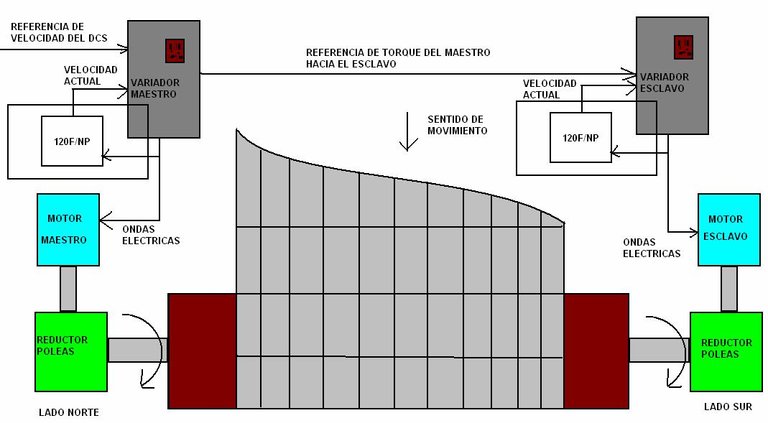
- Se inicia con el estudio de factibilidad para eliminar el sensor y realizar el control de torque del esclavo en modo sin sensor.
- Se realiza estudió la configuración de los variadores para programar esta configuración sin sensor con recursos propios.
- Se realizaron pruebas de simulación con motor y variador en taller para realizar la programación del equipo.
- Se implementó la configuración y se desconectó el sensor de velocidad en el variador esclavo de la parilla 610TG1 y se realizaron pruebas y ajustes constatando el correcto funcionamiento.
Resultados y Beneficios:
- El principal beneficio radica en eliminar los problemas asociados al uso del sensor o encoder que es propenso a fallar y generar confusión para el diagnostico eléctricomecánico.
- Se puntualiza la aplicación al configurar el sistema al modo de control de torque sin sensor conocida como vector control sensorless, ya que no justifica un encoder para un transportador de material.
- Se obtiene reducción de costos y ahorro por desarrollo del sistema con recursos propios, la implementación del mismo sistema sin sensor con terceros cuesta 180.000 US$.
- Reducción de Perdidas de Producción por tiempos operativos de reposición y diagnostico de fallas asociadas a la parilla al no tener encoder y descartar esta posibilidad de falla, es decir ya no es el encoder o taco porque no existe.
- Reducción de costos y tiempo por cambio de encoder, cables conectores alrededor de 5000 US$ por cada sensor cambiado.
- Operación y monitoreo de la parilla tanto en local como central idéntica a la anterior ya que el cambio es transparente.
Sin mas nada que decir me despido, pero sin ante pedirle que me den su opinión y sus comentarios de que le parece la mejoras. Gracias.
Excelente explicación del trabajo que realizas, saludos
Muchas gracias @franzo. Saludos.
Peace, Abundance, and Liberty Network (PALnet) Discord Channel. It's a completely public and open space to all members of the Steemit community who voluntarily choose to be there.Congratulations! This post has been upvoted from the communal account, @minnowsupport, by marcocarrasquel from the Minnow Support Project. It's a witness project run by aggroed, ausbitbank, teamsteem, theprophet0, someguy123, neoxian, followbtcnews, and netuoso. The goal is to help Steemit grow by supporting Minnows. Please find us at the
If you would like to delegate to the Minnow Support Project you can do so by clicking on the following links: 50SP, 100SP, 250SP, 500SP, 1000SP, 5000SP.
Be sure to leave at least 50SP undelegated on your account.