
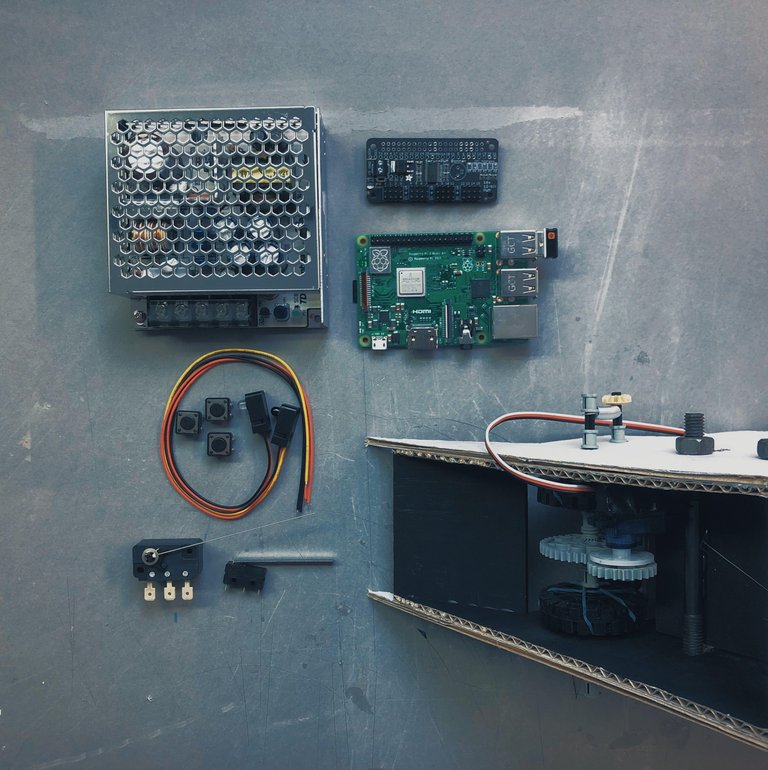
The whole machine will be managed by a raspberry pi, even the card feeder.
All servo motors will be connected to the adafruit servo bonnet.
I experiment with some adafruit switches and the IR break-beams sensor to control the feeder.
The whole machine will be managed by a raspberry pi, even the card feeder.
All servo motors will be connected to the adafruit servo bonnet.
I experiment with some adafruit switches and the IR break-beams sensor to control the feeder.