NEED TO CONTROL TRAFFIC
The constant growth in the world’s population and increase in private and commercial vehicles plying the road network at every given time give rise to the need to manage and control traffic, especially at intersections and areas with constant high traffic flow. I was opportune to work on developing a model for a smart traffic system to manage and control traffic at a 3 way intersection.
pixabay under the cco license
I will address this questions:
Why is it necessary?
How can it be achieved?
Why it is Necessary
There are numerous traffic lights at intersections which all operate on different principles, many of which are controlled by a timing IC (integrated circuit), to control the stop and pass duration for each section of the intersection.
However, there are limitations to the conventional traffic systems. And these limitations brings about the need for a smart system. These limitations include:
Fixed Timing
Vehicles have to waits until the green light is on. This time setting or delay duration is usually built based on an algorithm and a real time study of traffic pattern around the intersection. This pattern is then used to forecast traffic for the particular lane. However, this forecast cannot be accurate as too many factors can affect the density of traffic at every given time, and as such a lane with a lot of vehicles might actually be waiting on the red indicator to turn green while the lane presently enjoying the green indicator might not be having traffic.Unnecessary Waste of Time
A lot of quality time that can be spent on other things which are more productive, would have been spent on waiting aimlessly at intersections. Suppose a vehicle has to travel a hundred miles to reach its destination via some city and on its way it has to pass through numerous intersections of city. Since the traffic system at those intersections are controlled by preset timers then the vehicle will waste precious time at most intersections.Emergency Situation Management
Emergency cars are not considered. (For example, fire engines and ambulances have priority over other traffic. Other lanes should wait for them to pass through.) The delay experienced at these type of intersection may cost lives and a lot of money.
How it was accomplished
Timing would still be involved, but the major control is left to the hands of microcontrollers. For the purpose of model, an arduino based microcontroller was used. This model can be used to develop a full working smart system, but will be controlled by a much larger microcontroller than the ATMega328.
Microcontrollers are small computers on a single IC (integrated circuit)
The ATMega328 is the microcontroller used and it was programmed using arduino based C++ language.
ATMega328
This is a high speed microcontroller that operates between 1.8 – 5.5 volts, on a single chip. It has the capability to execute large and powerful instruction in a single clock cycle. The microcontroller is commonly used in many projects and autonomous systems where a simple, low cost microcontroller is required.
Since the microcontroller will not work on its own, it has to be installed on a board that will interface the microcontroller with other I/O devices.
I/O are also called input or output devices. They are other peripherals that are required in order for the system to work well but are not part of the microcontroller itself. These may include sensors, which are controlled by the microcontroller, depending on the instruction passed along by the program.
Sensors
Sensors are transducers which convert physical quantities to electrical signals. These physical quantities can be light, distance, motion, speed, sound and so on.
Transducers are electronic devices which convert signals from one form to another. An example is a microphone, which converts sound signal to electrical signal.
.jpeg)
flickr under the cco license
Infrared sensors were employed for this model. This sensor works base on infrared detection at a certain frequency. But, will moving cars emit infrared? Of course not, but, the sensor is in two part: the transmitter (LED) and the receiver (Sensor).
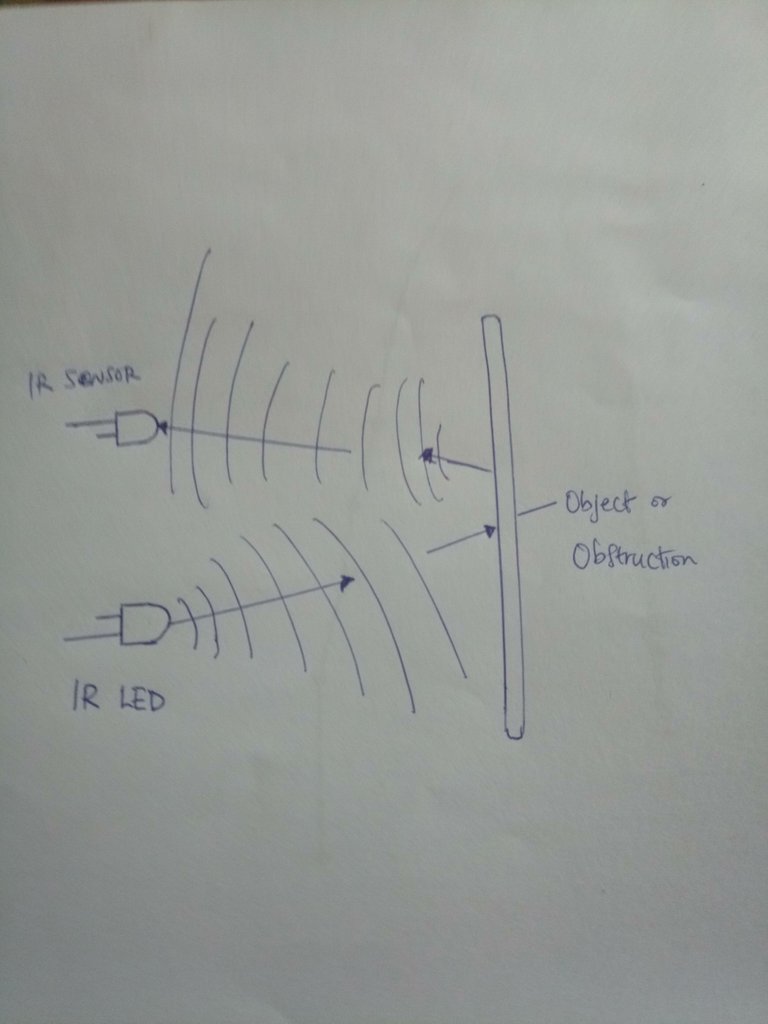 working principles of IR sensor
working principles of IR sensor
The infrared LED will continue to transmit infrared rays or light by connecting the sensor to the arduino board which will send a 5 volts signal through a resistor, until an obstacle or a barrier is hit, which then makes the infrared rays reflected back in the opposite direction. The reflected infrared rays caught by the receiver means an obstacle has been encountered and the sensor’s logic level changes from LOW to HIGH (0-1).
ARDUINO BOARD

pexel under the cco license
The arduino board is made of digital and analog I/O pins, which supply 5V and 3.3V and ground terminus pins.
There are different versions of the arduino board with different applications and capabilities. I will take my time to discuss this in details, but in the meantime, the algorithm is as important as the hardware. I developed an algorithm for the flow of traffic due to a study of the traffic condition at the intersection.
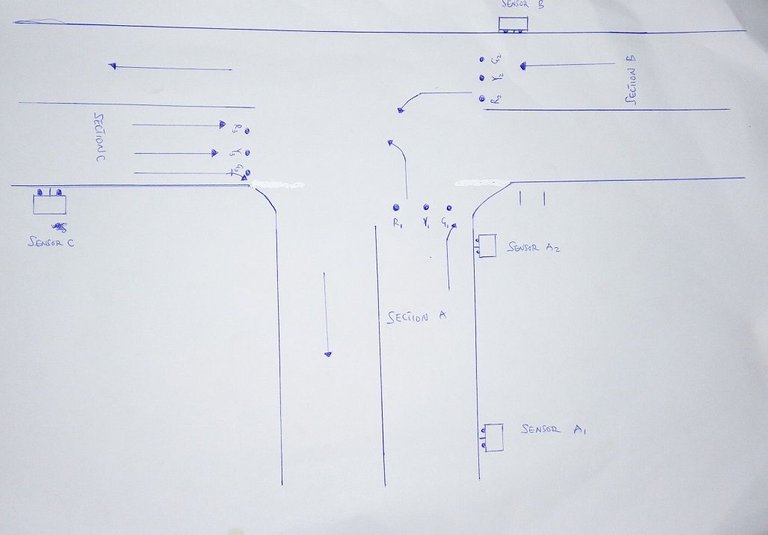
The above diagram is a sketch to represent the intersection and possible traffic flow.
SOFTWARE INTEGRATION
Stage 1
The sensor A1 and C will count vehicles passing and send the information to the microcontroller. When A1 counts four vehicles the microcontroller checks if there is a vehicle at sensor A2 and if sensor C has counted at least 10 vehicles. If that condition is ascertained, the section C and B green LEDs will flash for 3secs, section A’s red LED will turn yellow to signal ready for 3secs, after which section C and B’s green LEDs will turn red and section A’s yellow LED will turn green to signal a go-ahead. This will happen for 10secs.Stage 2
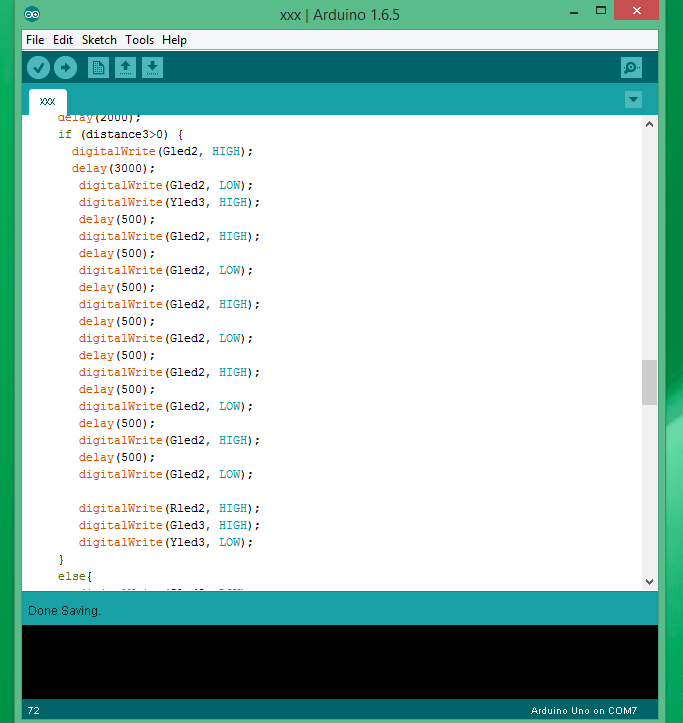
After 10secs, the section B’s red LED turns yellow for 3secs to signal ready, while section A’s green LED flashes for 3secs. After 3secs A’s green turns red and B’s yellow turns green for 2secs, then sensor B checks if vehicles are still passing, if they are then it allows another 3secs before executing the next command but if no vehicles passes after 2secs, stage 3 activates.
- Stage 3
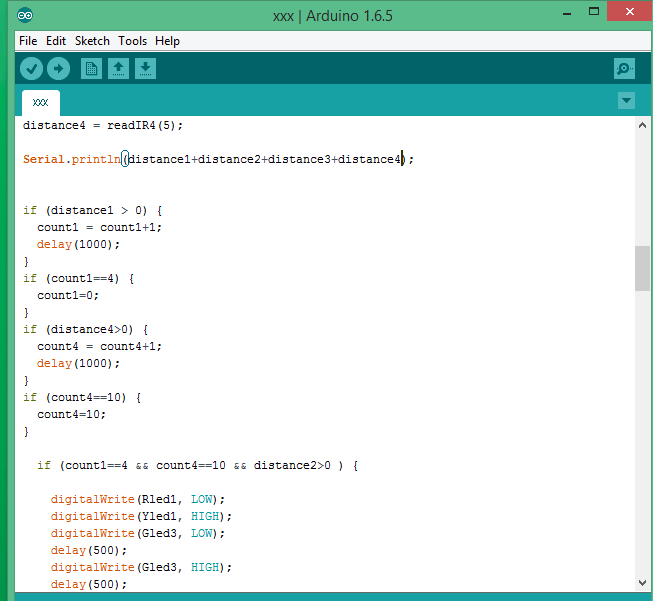
Section B’s green LED flashes for 3secs while section C’s red LED turns yellow for the same 3secs. After 3secs, section C’s yellow turns red and section B’s green LED turns red. This condition remains indefinitely until stage 1 occurs again.
The design puts priority on the straight Road while other sections are checked from time to time to determine if the traffic has built up.
TESTING THE MODEL
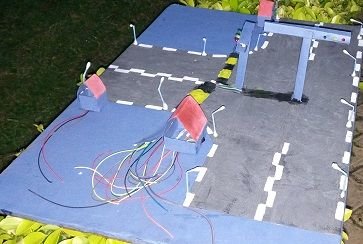
The circuit for the IR proximity sensors were first assembled and tested to check for sensitivity and check if it is working.
Then the entire circuit was assembled on a breadboard to test, write the program and make adjustment to the circuit.
The program was written stage by stage and testing took place while writing to avoid serious mistakes and clumsiness.
Material References
Cai Bai-gen, ShangGuan Wei, Wang Jian & Chen Rui (2009) “The Research and Realization of Vehicle Detection System Based on Wireless Magneto-resistive Sensor”, Second International Conference on Intelligent Computation Technology and Automation.
Findler and Stapp (1992) “A distributed approach to optimized control of street traffic signals”, Journal of Transportation Engineering.
Ganesh S. Khekare, Apeksha V. Sakhare, “Intelligent Traffic System for VANET: A Survey”, International Journal of Advanced Computer Research, Volume-2 Number-4 Issue-6 Dec 2012.
International Journal of Innovative Research in Science, Engineering and Technology. Vol. 1, Issue 2, Dec 2012.
KartikPandit, Ghosal, D., Zhang, H.M., Chen-Nee Chuah, “Adaptive Traffic Signal Control with Vehicular Ad hoc Networks”, IEEE Transactions on Vehicular Technology, Volume: 62, Issue: 4May 2013.
Ms.PromilaSinhmar, “Intelligent Traffic Light and Density Control using IR Sensors and Microcontroller”, International Journal of Advanced Technology & Engineering Research (IJATER) ISSN NO: 2250-3536 VOLUME 2, ISSUE 2, March 2012.
If you like my content pls don't forget to upvote and resteem
Awesome work you got here @real2josh, it is always annoying to be stopped by a red light and the other lane with green light would be free as something else.
Thanks @rharphelle. I intend to build the real type some day
You wouldn't know how many times I have sat at a traffic light and not been able to "legally" turn left at the cross section. The sensor controllers in the US have small grids that actuate the amount of metal of the vehicle. If one is on a motorcycle you might be sitting there many cycles before the sensor picks it up or a car also needs to turn the same way.
Irritating.
Thanks. I heard the system over there also incorporates an override for pedestrians too
This is great. It's about time Artificial Intelligence take control of our roads. It'll be effective and efficient, unlike the current system.
You did a great job with this post. I can only imagine the amount of work you put in. Thanks for sharing!
Thanks man. I actually built a model to demonstrate how possible it can be.
Great work @real2josh. Keep going bro!!
Did you read it?